
前回それなりに顔認識はできましたが、画像が何秒か遅延し、リアルタイムでは表示されなかった。
パソコンが遅いのか、画像処理に時間がかかってしまっているのかわかりませんが、イメージとは違い失敗です( ;∀;)
違うパソコンを使った 画像処理のほうがよかったのかもしれません windowsでなく手持ちのmacのスペックがましなほうでチャレンジしてみます。
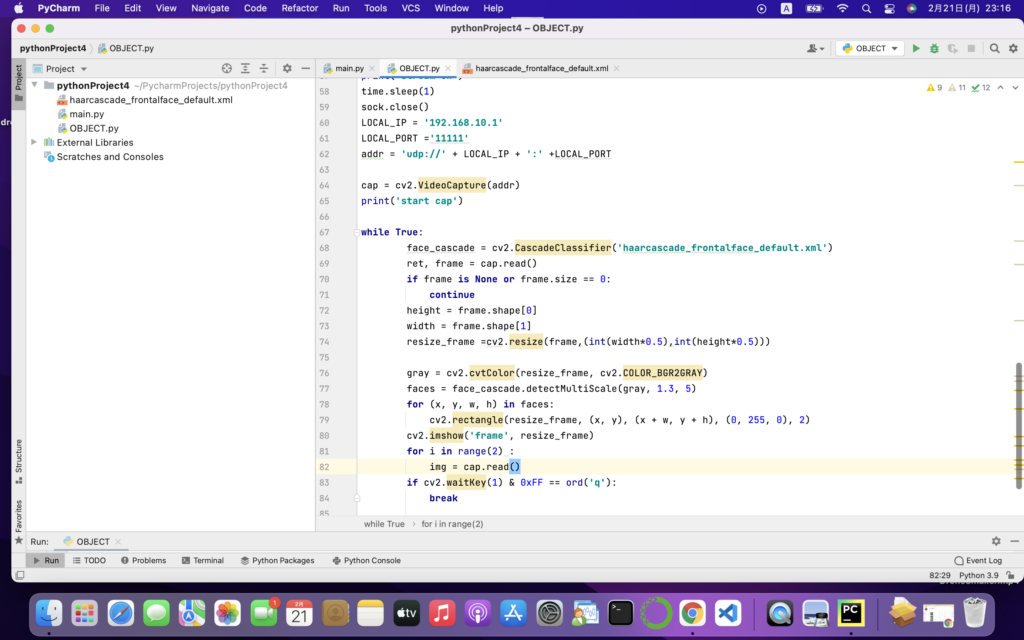
まずは、カメラ画像の表示容量の縮小するため、cv2.resize を使い表示容量を少なくしパソコンに負荷がかからなくしました。
次にrange()関数をとりいれました。参考にさせていただいたのは「顔認識しながら飛ばすドローンの開発」です。感謝です。
range()関数の内容は、私には難しいのですが、pythonチュートリアルによると、
range通常のlistまたは に対するタイプの利点はtuple、rangeオブジェクトが表す範囲のサイズに関係なく、オブジェクトが常に同じ(少量の)メモリを使用することです( 、、および値のみを格納しstart、個々のアイテムおよびサブ範囲を次のように計算するため)必要.
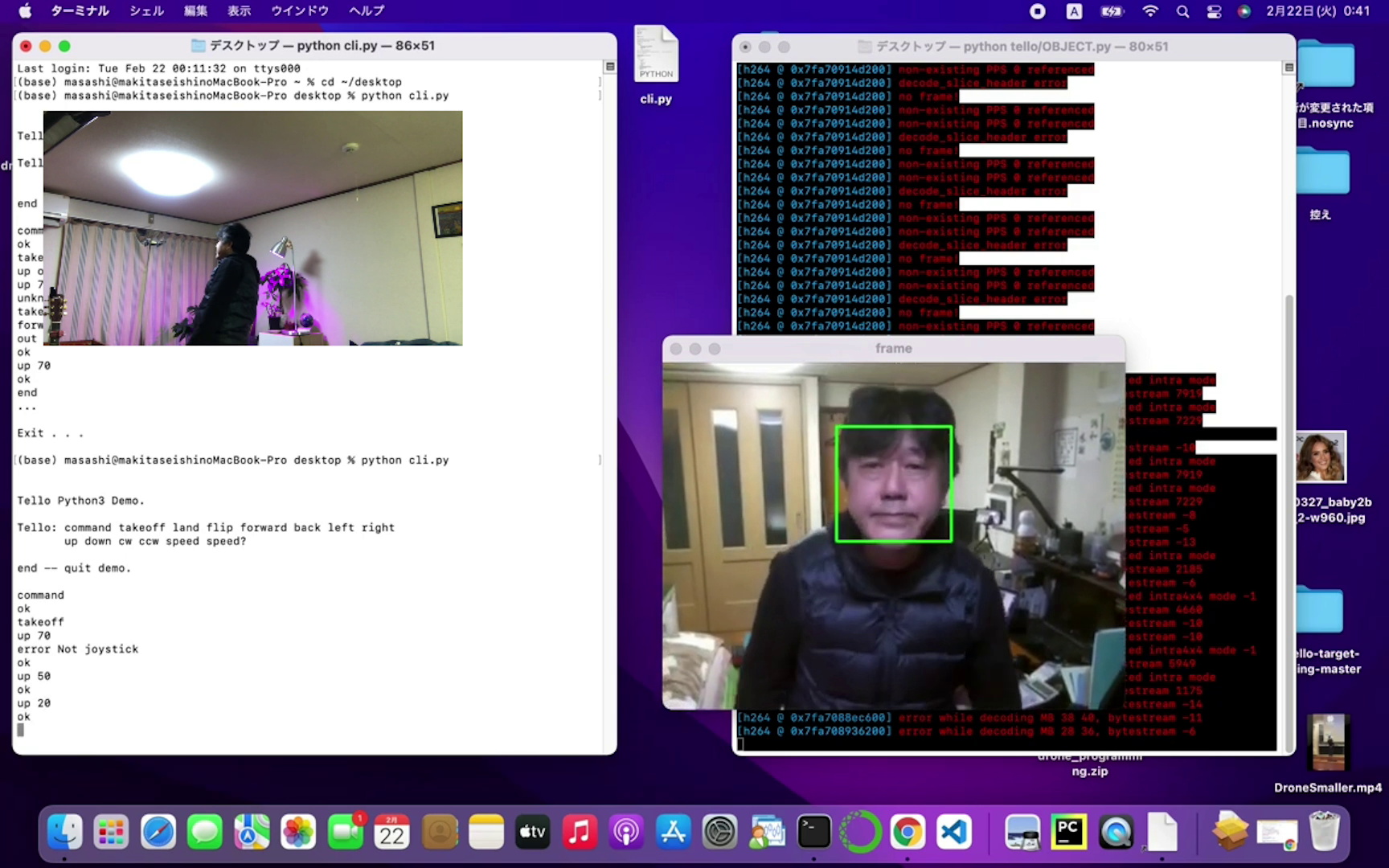
それでは一応すべてクリアーしたので Drone(Tello)を使って 顔認識をしてみます。
それでは、ドローンを飛ばして顔認識をしてみます。(^^♪ pyCharm ではプログラムを2つ同時に動かすには動きが表示できないので、コマンドプロンプトを2つ走らせ先のcli.pyとOBJECT.pyを実行してみました。 faces xmlファイルが認識されていない為エラーになりましたのでしたがってCascadeClassifierの参照を(cv2.data.haarcascades + に追加変更しクリアー!! 実行してみました。 まぁまぁ上手くいきました。
ドローンを飛ばしてまずまず顔認識ができましたので、次は顔認識の位置表示からの算出での自動追尾にチャレンジします。


-
知りたかった、Telloの中身をのぞいてみた・これがTelloだ!!

DJI Tello 基板【ちょっと解説】 ※DJI公式非公開のため、一部は分解事例・基板配置からの確定度の高い…
-
PRIVACY POLICY Last updated September 29, 2025 This Pri…
-
ArUcoマーカーの検出を使った、Telloのプログラミングゲーム
OpenCVのArUcoマーカーの検出で構築。AR(拡張現実)(Augmented Reality)とは、現実…