




DJI Tello 基板【ちょっと解説】
※DJI公式非公開のため、一部は分解事例・基板配置からの確定度の高い推定です
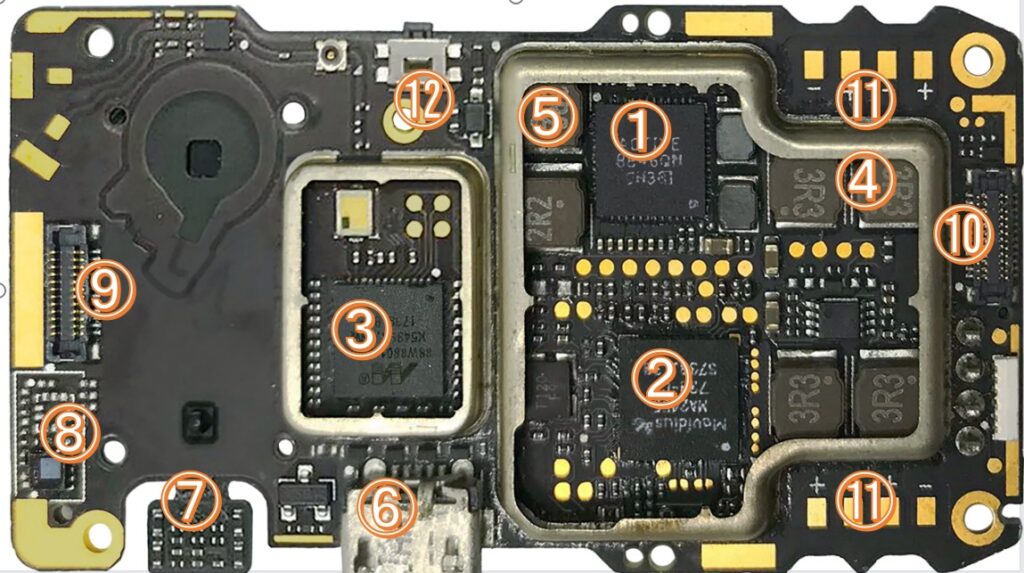
① メインフライトコントローラ(SoC・System on a Chip))写真右上中央(大きな黒IC)
正体
- ARM Cortex系 SoC(DJI独自仕様)
役割
- 飛行制御の中枢
- PID制御
- センサーフュージョン
- モーター出力計算
- 通信制御の司令塔
教育的表現
「考えて・判断して・命令を出す“脳”」
② セカンダリ制御IC(制御補助 / センサーハブ)写真右中央(①の下)
正体
- 制御補助用MCU or DSP系IC
役割
- センサー処理の分担
- リアルタイム性の高い処理
- メインSoC(System on a Chip)の負荷軽減
「脳の右腕(反射神経担当)」
③ Wi-Fi / 映像処理SoC。 写真左中央(金属枠内)
正体
- Wi-Fi通信+映像エンコードSoC
役割
- 映像圧縮
- UDPストリーミング
- SDK通信
Pythonで
streamonした時に働く心臓部
④ ESC制御+モータードライバ(その1) 写真右上(3R3表記の横)
正体
- ESC電源・制御系IC
役割
- モーター回転制御
- 高電流制御
ブラシ付きモーターを直接制御
⑤ ESC制御+モータードライバ(その2)写真右上(①の左)
役割
- 別モーター系統担当
★ ④⑤+⑩などで 4モーター分
⑥ 下向きToF / VPS電源・制御部・写真下中央(USB近く)
正体
- 距離センサー制御回路
役割
- 高度検出
- ホバリング安定
「床との距離を測る目」
⑦ IMUセンサー(6軸)写真左下(白シール横の小IC)
正体
- ジャイロ+加速度(6DoF)
役割
- Pitch / Roll / Yaw 検出
⑧ 電源管理IC(PMIC) 写真左下端
役割
- LiPo 3.7V → 3.3V / 5V
- 過電流・低電圧保護
電気の交通整理係
⑨ 下向きカメラコネクタ・写真左側フレキ接続部
役割
- 光学フロー用カメラ入力
GPSなしで止まれる理由その1
⑩ ESC制御+モータードライバ(その3) 写真右側中央
④⑤⑩+反対側で 4ch ESC完成
⑪ モーター電源ライン(+)写真右上下の「+」マーク部
役割
- バッテリー電力供給
- モーター駆動用大電流ライン
⑫ RF / クロック / デバッグ系・写真上中央小IC
役割
- 通信補助
- クロック生成
- 製造時デバッグ
工場専用(触れない)
Telloの中身は大体わかったので。。。
ドローンを自作してみたくなった(^_-)-☆
自作ドローンの入門用としてプログラミングを学んだり、センサーを追加・カスタマイズしたりするのに最適で、GPSや映像伝送(OSD)なども統合していきたいです。
しかし、これはFPVブラッシレスモーター用専用ソフトなので、いろいろコストがかかるので、とりあえずサーボモーターでやってみた。結果はサーボモーターではTRI機Yaw角度しかできなかったです。
したいことは、MultiWii(マルチウィー)など、Arduinoというマイコンボードをベースに、Wiiのコントローラー(モーションセンサーなど)と組み合わせて、マルチコプター(ドローン)を制御するためのフライトコントローラー(飛行制御装置)今回はMPU6050(ジャイロセンサー)とそのソフトウェアを使いすることです。
MultiWiiConf は Java必須です。https://www.java.com/ja/download/ それとProcessing から MultiWiiConf を起動する Processing をインストールhttps://processing.org/downloa(Processing 3.x を推奨)